
目前,有五种腹腔镜肾手术方法:经腹、腹膜后、手辅助、机器人和单孔腹腔镜手术(LESS)和经自然孔腔镜手术(NOTES)。
1.经腹的入路
经腹腹腔镜是传统的腹腔镜治疗肾脏疾病的方法,也是应用最广泛的方法。它提供了最大的操作空间,也有易于识别的解剖标志来方便定位,在腹腔镜戳卡和仪器的角度上有更多的通用性,可以用最少的腔镜器械。这种方法的设备成熟,但与任何方法一样,需要手术操作的专业熟练度。
患者体位和鞘卡放置
对于大多数经腹腹腔镜肾手术,患者最初是仰卧位进行全身麻醉诱导和气管插管。放置导尿管和胃管,用于膀胱和胃的减压。连续加压长筒袜用于预防深静脉血栓形成。对于经腹手术,包括机器人辅助腹腔镜手术,患者调整至30~45°的侧卧位置。注意保护所有压力点,以减少神经损伤的风险,减少组织受损和横纹肌溶解的发生率。将患者固定在手术台上,手术台侧向倾斜(图1)。最大限度地利用手术室空间,并允许手术团队的所有成员查看手术过程(图2)。
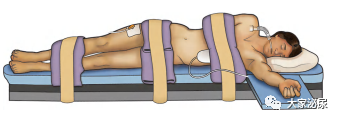
图1:患者位于改进的侧卧位,手术侧倾斜30~45°,使用凝胶垫支撑背部。手臂放在软垫扶手上,另一只手臂放在胸部上方。用宽布或丝质胶带固定患者,以便在手术过程中可以旋转工作台
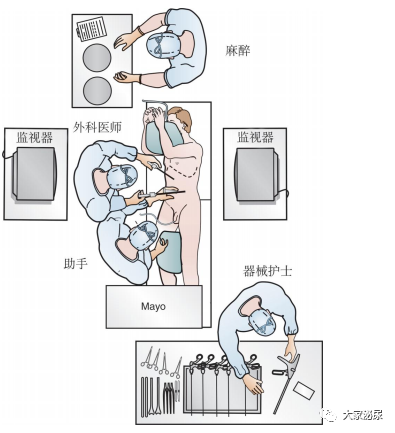
图2:左侧肾切除术的手术室配置安排。两个显示器允许助手观察操作。器械护士的位置很容易帮助交换器械
建立气腹,首先放置三到五个鞘卡(图3)。对于不同的肾手术放置不同的鞘卡。12 mm鞘卡放置在腋窝前线脐水平。在较矮的患者中,可以位于中线,或在脐和耻骨之间的中间。在脐部放置一个10 ml鞘卡用于摄像头观察,在剑突下方2 cm的中线插入一个5或 10 mm的鞘卡。在肥胖患者中,所有鞘卡的位置都可以横向移动的(见图3C)。也可能需要额外的鞘卡辅助操作(图4)。额外的中线10 mm或12 mm鞘卡可用于辅助收回或使用腹腔镜器械。
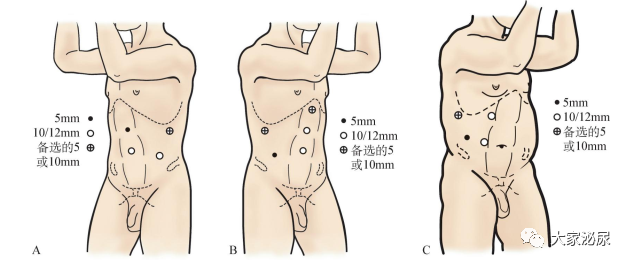
图3:左侧(A)和右侧(B)手术的鞘卡放置位点。在脐水平的腹直肌外侧放置一个12 mm鞘卡,在脐处放置第二个10 mm鞘卡,在脐与剑突之间的中线插入一个5 mm鞘卡。C.对于肥胖患者,所有鞘卡都是可以横向移动的。

图4:附加鞘卡放置和仪器的选项。A.可以放置在耻骨联合上方的5~10 mm鞘卡,或通过肋下切口的5 mm器械和牵开器来完成左侧手术。B.右侧手术中,在中线放置3-5 mm操作鞘卡。C.也可选中线下10 mm放置另外的操作鞘卡
2.腹膜后的入路
腹膜后入路是模仿开放手术,是可以避免进入腹膜腔的。创建一个潜在的空间来进行可视化的外科手术。对于腹腔镜部分肾切除术(LPN)、囊肿去顶减压术、肾盂成形术或肾活检或有腹膜炎或有多次腹部手术史导致腹腔内粘连的患者,这种方法可能是首选。
患者体位和鞘卡放置
患者呈侧卧位置,手术台适度的弯曲可以帮助增加肋骨和髂骨之间的距离,以方便放置鞘卡。手臂可以固定在枕头上或特制的扶手上。在腋窝后缘,也就是第12肋骨和髂骨之间的中段,做一个15 mm的横向切口(图5A)。

图5:腹膜后肾手术的鞘卡放置。A.患者全侧位,髋部弯曲,肾区抬高,在第12肋骨尖下2 cm处,肋骨与髂前上棘之间切开15 mm切口。B.示指通过切口插入,钝性剥离,穿过肌肉,进入腹膜后间隙。如果手指在正确的位置,医生应该能感觉到腰大肌的光滑表面和肾下极被Gerota筋膜覆盖。C.为了快速创建操作空间,插入一个由8或9号手套的手指制成的气球,用丝绸缝合固定在一个简单的红色橡胶导管上。然后在气球里装满600~800毫升的盐水。D.鞘卡卡住该入点,并可以360°旋转。
通过腰背筋膜向下深入,进入腹膜后,用手指尖端在腰肌和肾之间的空间进行钝性游离,形成一个操作空间(图5B)。用两个8或9号手套的指套制成气球,然后可以注入二氧化碳或盐水,或者一种带有完整气球的特制鞘卡可以用来扩大操作空间。两者都有助于腹膜后操作空间的建立(图5C)。鞘卡通过切口,鞘卡袖带扩张并与皮肤紧密衔接,以防止CO2泄漏(图5D)。另一种方法是通过初始切口进入0°镜在可视环境下完成操作空间的建立(图6A)。进入腹膜后可能被腹膜后的黄色脂肪的外观所迷惑,开始充入CO2,仅使钝性分离就可以建立操作空间(图6B)。操作过程中必须小心,不要盲目进入太深,因为可能发生腹膜入口或结肠的意外损伤,也可能导致腰方肌或腰肌来源的出血。一旦建立了操作空间,就可以为鞘卡的放置定向。典型的腹膜后腹腔镜手术,5 mm鞘卡放置在离第12肋骨顶端不远的位置。(见图5A)。

图6:A.站在患者身后,首先使用0°腹腔镜,在腰大肌和肾之间形成钝性分离出一个的空间。B.将腹膜直接推向腹膜内侧,从而形成一个足够大的工作空间,以便放置更多的鞘卡
腹膜后入路的最大限制是有限的操作空间。更小的操作空间限制了鞘卡之间的距离,造成了操作器械的互相干扰。此外,由于手术区域更接近摄像头,可能经常发生摄像头被水蒸气、血液等干扰。如果在手术过程中需要更大的空间,最初的腹膜后入路可以通过在直视下打开腹膜扩大到经腹入路。尽管存在一些局限性,但在某些情况下,腹膜后入路可能是首选。有足够经验的外科医师可以通过这种入路进行各种腹腔镜肾外科手术。
3.手辅助腹腔镜手术
手的帮助为开放手术和纯腹腔镜手术提供了一个桥梁。它提供了更直观的协助,通过外科医师的手游离组织,同时通过触觉反馈。手辅助必须创建一个足够大的切口。这项技术可能对腹腔镜新手医师和治疗肾周围有明显瘢痕的患者有利。在紧急情况下,如出血,也可以使用手辅助,通过扩展戳卡位置和放置一个手端口来帮助实现血管控制和修复。
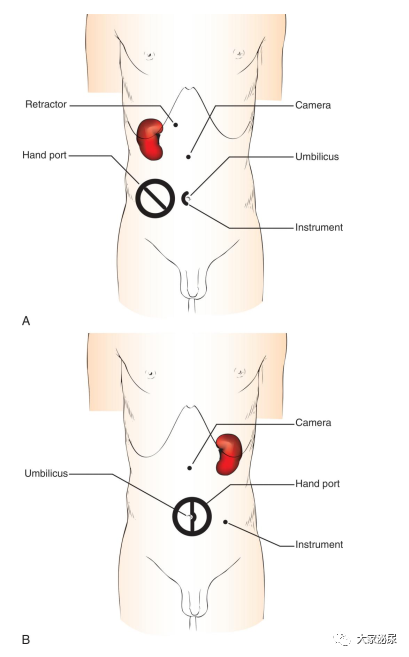
图7:右手外科医师的手辅助端口的放置。A.对于右侧肾,将手辅助装置放置在右侧下象限,插入左手及通过放置在右侧器械进行解剖。摄像头放置在肚脐上方几厘米的中线处。通常推开肝是必要的,便于游离肾门。肝或肠牵开器可以通过肋下鞘卡放置,以帮助操作。B.对于左肾,手辅助装置和左手通过脐周切口放置,配合放在乳头内侧肋下边缘的器械进行游离。摄像头放置在实际手辅助设备边缘(不是切口边缘)的几厘米处
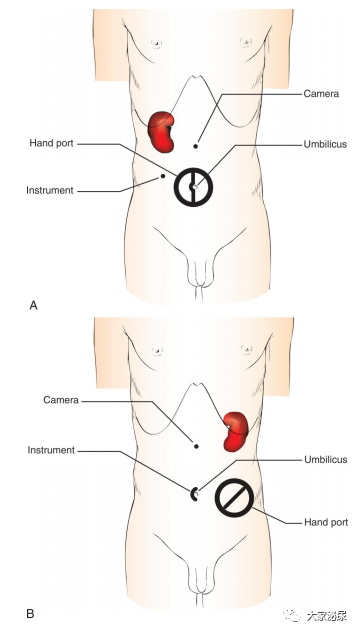
图8:左手外科医师的手辅助端口的放置。A.在右肾手术时,左手外科医师将手辅助端口放置在脐周位置以插入右手。左手的辅助端口位于腹直肌的外侧,与脐平齐或略低于脐水平。摄像头通过腋窝前线的外侧放置。B.在左肾手术时,手辅助的端口被放置在左下象限用于插入右手。左手通过脐鞘卡工作,摄像头放置在脐和剑突之间
4.机器人辅助腹腔镜手术
达芬奇机器人辅助外科系统已经被广泛采用,通常被称为机器人手术。该设备使用计算机系统和一系列机械臂将外科医师的动作转化为腹腔镜平台下的动作。与单纯的腹腔镜手术相反,器械的左右运动被保留下来。此外,手眼关联被保留,一个双镜头系统提供三维可视化和深度的感知。机器人的操作臂有助于精细解剖,缝合和其他具有挑战性的腹腔镜任务。尽管增加了成本,这些技术已经允许更多的外科医师为他们的患者提供精细微创手术。与标准腹腔镜相比,机器人手术需要熟练的助手和更多的鞘卡,但大多数腹腔镜肾手术可以通过一个内窥镜和两个工作鞘卡单独完成。机器人平台为更多的患者提供精细微创治疗的机会。

图9:机器人辅助腹腔镜左肾部分切除术的手术室配置
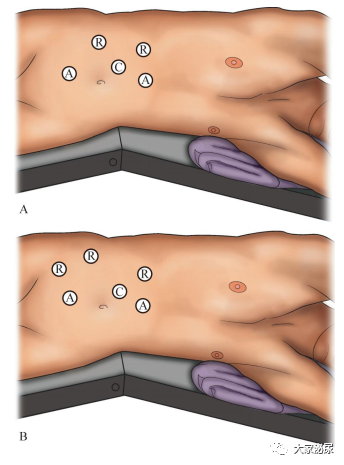
图10:机器人辅助腹腔镜肾手术鞘卡的放置。:A.三臂系统配置。B.十字型系统配置。(A:辅助鞘卡;C:摄像头端口;R:机器人鞘卡。)
5.单孔腹腔镜手术和自然孔腔内镜手术
ESS指的是单孔腹腔镜技术,它将所有的鞘卡合并在一个皮肤切口内,通常隐藏在脐内。与标准的腹腔镜手术相比,这种肾外科手术方法的发展目标是进一步改善美观,减少术后疼痛。可以使用标准腹腔镜鞘卡,也可以特制的自制多通道接入设备或多通道工作鞘卡,通常放置在脐或腰部以下,以减少可见瘢痕。到目前为止,几乎所有的肾切除术和重建手术都可以通过单孔腹腔镜来完成。

图11:单孔腹腔镜使用三个低轮廓鞘卡针通过单个小切口插入,可以灵活的使用器械
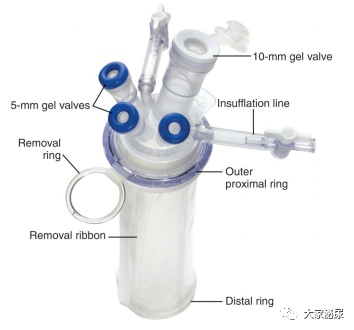
图12:单孔腹腔镜手术专用设备
本文引自《坎贝尔-沃尔什泌尿外科学》第11版中文编译版

